A customer exploring current technology for GIS data capture was interested in using a TruPulse 360 combined with GPS.
They wanted to know how the procedure worked, what kind of accuracy they could achieve and if there was any increase in efficiency in the field. This paper will describe what the results were in each of these areas of performing Laser Offsets with a GPS for feature location.
The Site
A test course was set up in a local park consisting of 21 features scattered about a parking area of ~ 5 acres (Figure 1). They ranged from sewer & water objects flush to the ground to trees, light poles and signage. The ground was relatively flat with a few small swales for drainage. The 21 objects were surveyed in with an optical total station creating a set of known coordinates to compare the laser data to. It is assumed these points are within 1” relative accuracy.
The Work Flow
A Laser Offset is a mapping technique whereby one occupies a single position with a GPS and derives a coordinate for that spot. Then Distance, Inclination and Azimuth are measured to a remote feature with the TruPulse 360 by sighting on the object and firing the system. This data is then applied to the GPS position, the coordinates of the remote feature are calculated and it is placed on the map. Thus, from a single location, all features that are in view can be mapped by simply measuring to them with the laser. Some important tips for field procedure with the TruPulse 360 were used on this test and are as follows:
A spot to stand with the laser was chosen that had a clear line of sight to all the objects to be mapped
In addition, the spot was chosen based on the absence of any large metallic objects in the vicinity that may have distorted the magnetic field and thrown the compass off
The GPS and laser system were set up exactly how it was to be used when mapping. A passive antenna needs to be >6” away from the laser and a data collector >18” away
A Compass Calibration was performed on the TruPulse 360, making sure the PASS indicator was displayed when done. If it had not passed, proper procedure would need to be checked and verified; and a Tilt Sensor Calibration would need to be performed prior to calibrating the compass again.
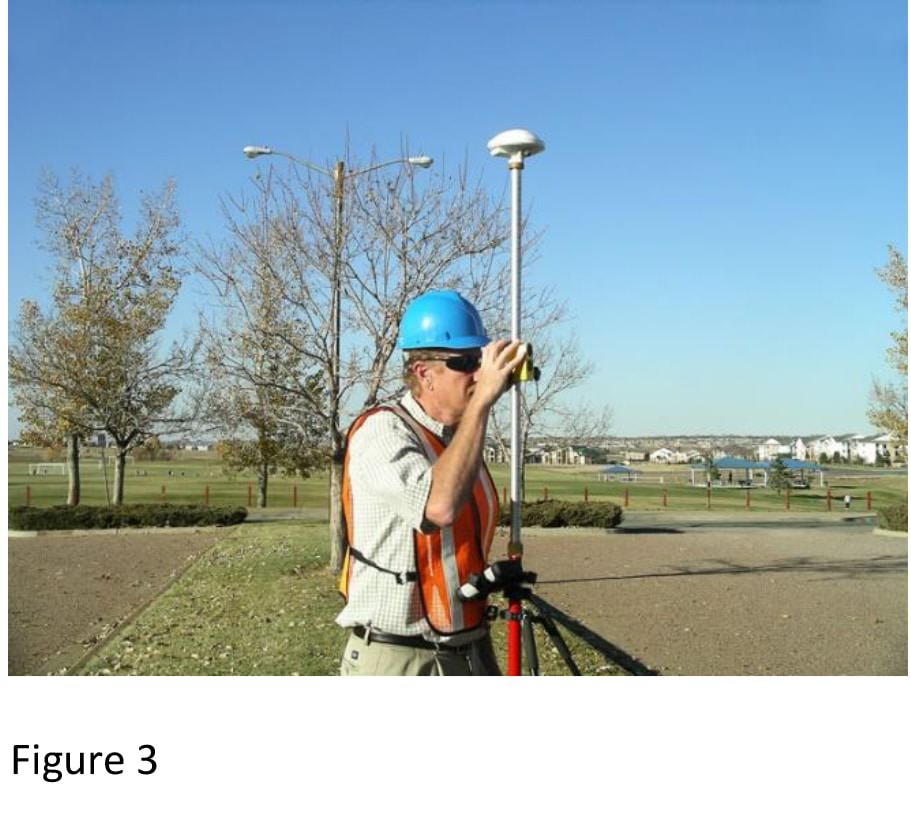
Two methods of mounting the TruPulse were used. One was handheld where as long as the GPS unit was kept >18” away from the laser when measuring, good results were obtained (Figure 2). The other configuration tested was pole mounted, where the proximity values above were observed and the Antenna cable was fixed to the pole so as not to move during laser operation (Figure 3).
When targets were measured with the laser, the unit was put into HD mode and the presence of a decimal point in the distance value was always observed. This ensured the distance accuracy was within the +/- 8” spec. Whenever the decimal did not come up right away when measuring to a target, the FIRE button was held down for a few more seconds until it did.
The Results
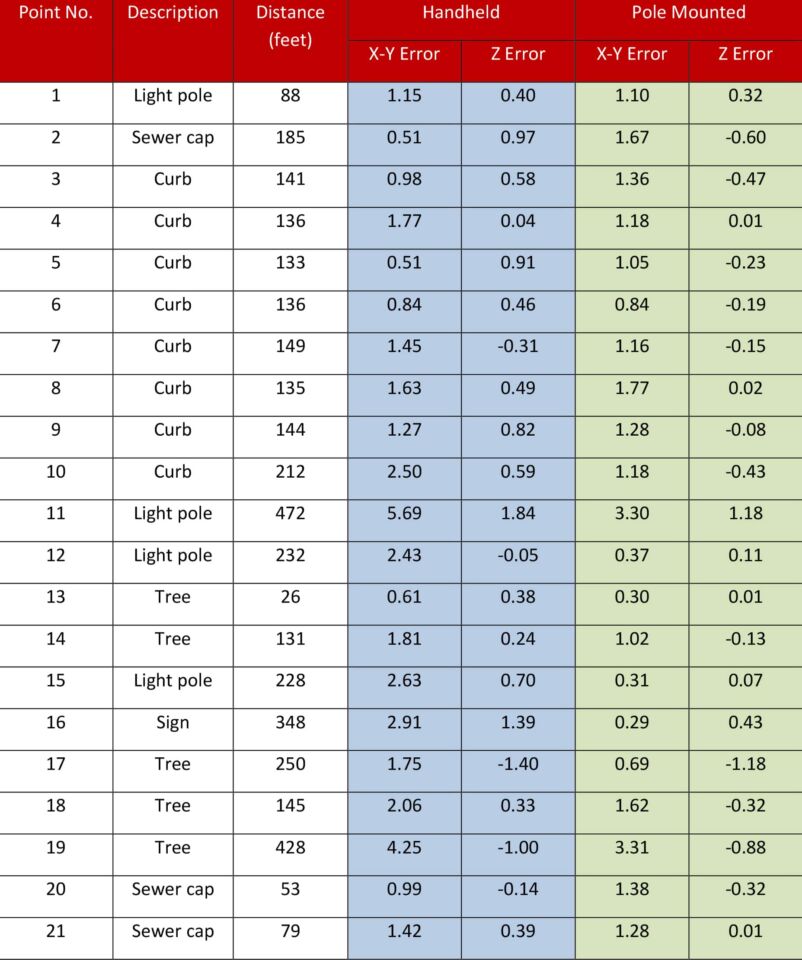
The table below shows the distance away each feature was from the measurement point and the amount its position varied from the control data measured with the total station.
Observations
Typical Horizontal (XY) accuracy @ <300’ when handheld < 2.5’
Typical Horizontal (XY) accuracy @ <300’ when pole mounted < 1.5’
Noted that, in general, the error in position increases as the distance to the feature increases. This is primarily due to angular error contributed by the compass.
Typical Vertical (Z) accuracy @ <300’ averaged 6” handheld and 3” when pole mounted
Time to shoot in all 21 points with the laser was ~90 sec. Time to walk to each point with a GPS antenna was ~12 min. This does not account for time used to enter attributes or extra occupation time needed to increase GPS accuracy.
Conclusions
Final position of a feature must include any error from the laser shot PLUS any error in the GPS position it is measured from. The data presented here is used solely to evaluate laser performance.
Mounting the TruPulse 360 on a pole increases stability, repeatability and lessens the maximum error in position. This is the preferred method of use.
If navigating to laser offset positions with GPS to determine their accuracy, any error in GPS position must also be considered
Time savings are significant when using the laser offset workflow, especially when projected out over an entire work day collecting hundreds of points or an entire project where thousands of positions are required
When sub-meter accuracy is required for a project, the use of a pole mounted laser shooting offsets at distances < 300’ and a decimeter GPS position will keep final positions within spec
If elevations are required for a project, the laser offset contributes very little error to the final result